Game Reserve Final Project
The Assignment:
You will work in a team of two. If one of you studied Python, and the other one Scribbler, then you should use
an Edison AND a Scribbler, as everyone must contribute to the program. You will probably have to create
attachments for your Scribbler or Edison – you may use LEGO, cardboard, or other appropriate materials.
You may also design an attachment for the 3D printer using TinkerCAD.
Remember that we don’t have much time left.
The task choices are:
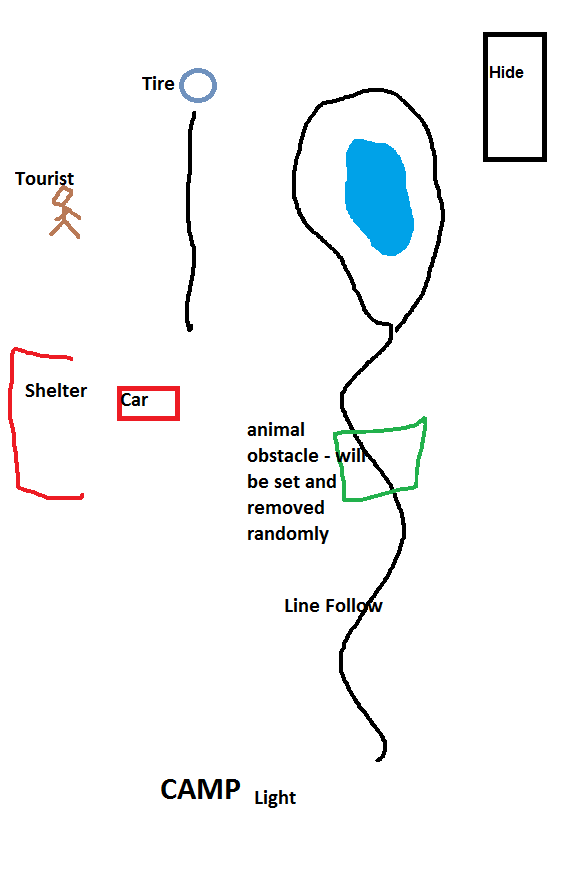
Follow the winding road on the right of the board. Stop if an animal is in front of you, then
continue when the animal moves off. Stop at the water hole for 2 seconds, so the ranger can
check that everything is OK there. Continue back on the road to the camp.
- Road Upkeep part 2 (optional)
Once the third animal has stopped you, night has fallen, so leave the road and head back to
the bright light at the camp.
Find the abandoned car in the veld and return it to the shelter where wild beasts won’t destroy it.
WOW! points if you use a good attachment.
The tire of the abandoned car rolled away and was thrown on top of an ant-hill by an enraged
elephant. Retrieve the tire and return it to camp.
WOW! points if you use a good attachment.
The driver of the car stupidly left it and walked off to look for help. Rescue him from the pride of
lions who think he might make a good dinner and take him back to camp.
WOW! points if you use a good attachment.
Take the tourists from the camp, and deliver them to the hide, so they can photograph animals.
You must do at least two of these missions. If you do more than two, they will count as extra credit.
If you combine two or more of them into one program (except for Road Upkeep 1 &2, which must be
one program), you will earn extra WOW! points.
Your first task is to design an attachment for your robot. You may use LEGO, paper, cardboard or you
may design and print a 3D printed item to fit your robot.
Next, write algorithms or a flow charts for your missions.
Do a Flow chart for Mission 1 and an Algorithm for mission 2.
You will find sheets for these
in your Google drive. Remember that an algorithm
is a set of step by step instructions, for example:
- Robot moves forward 30 cm
- Robot turns right 90 degrees
- Robot moves forward until it sees an obstacle
Make sure that you read the rubric carefully several times while you are working, to make sure you understand
the criteria and include all the requirements.
Your program must be turned in. Python programs must be appropriately documented.
RUBRIC
Item |
Points available |
Points earned |
Design for robot attachment |
5 |
|
Create appropriate robot attachment |
5 |
|
Algorithm or flow chart for mission 1 |
10 |
|
Algorithm or flow chart for mission 2
| 10 |
|
Well-planned movements |
10 |
|
Variation in speed of the robot |
5 |
|
Two sensors used |
20 |
|
Performance was autonomous |
5 |
|
Mission was attempted well |
5 |
|
Mission was completed successfully |
5 |
|
Working program was turned in (Python – has appropriate comments) |
20 |
|
Total |
100 |
|
|

