Learn to program
Learning Goal: Understand how to write a program to control a robot, using loops, conditionals and subroutines where appropriate.
Finch Assignment 12 - Obstacle detection
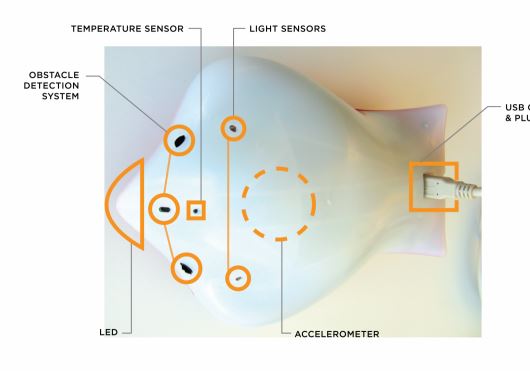
Obstacle Detection. The Finch has two Infrared sensors. These sensors can detect obstacles in front of the Finch. The obstacle sensors detect whiteboard surfaces better than anything else, so ask me for some small whiteboards.
The Finch has a left obstacle sensor and a right obstacle sensor. The command given in the instructions are: Left_obstacle, right_obstacle = finch.obstacle()
You can test the detectors by running the program. Play with this program and the whiteboards for a while, to get a sense of how well the
Assignment 12:
Program the Finch to move around, but avoid the whiteboards. To turn it in, look at the instructions below:
Write a Reflection on what you have learned.
|
|